

SY-288 彩屏自动操舵仪
船用自动操舵仪
SY-288彩屏自动舵 详细说明书 请扫二维码


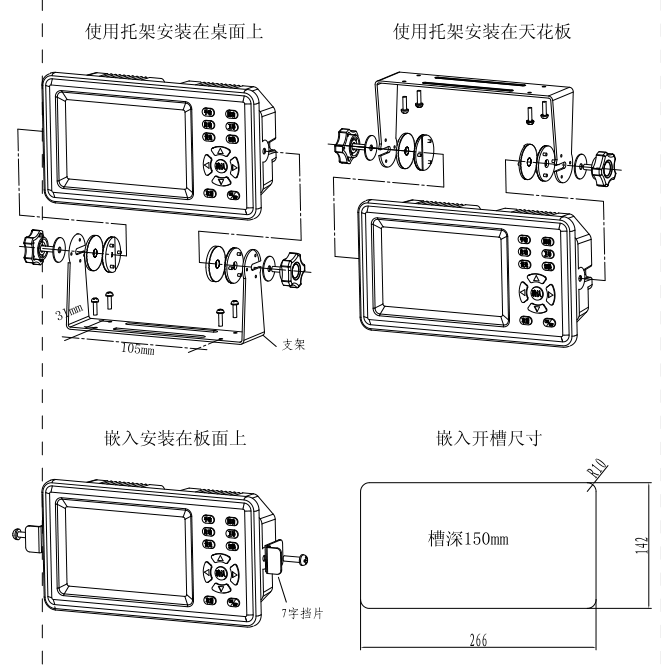
一、控制单元安装
1、控制单元
由于控制单元使用了许多精密的电子/电气元件,安装地点应满足如下要求:
1)应安装在湿度底的地方4)不直接暴露在海水或海风的地方
2)容易操作的地方5)不直接暴露在日晒的地方
3)容易安装和维修的地方6)不受振动的地方
注意:不要把该单元安装在有剧烈振动或直接暴露在海水、海风或雨水中,否则将使该单元产生故障,导致操舵失灵。
二.手电一体连接器安装
1.手电一体安装用法
在安装有转向器的船上,将手电一体连接器安装在转向器上,并固定在箱体上,再装上方向盘即可。
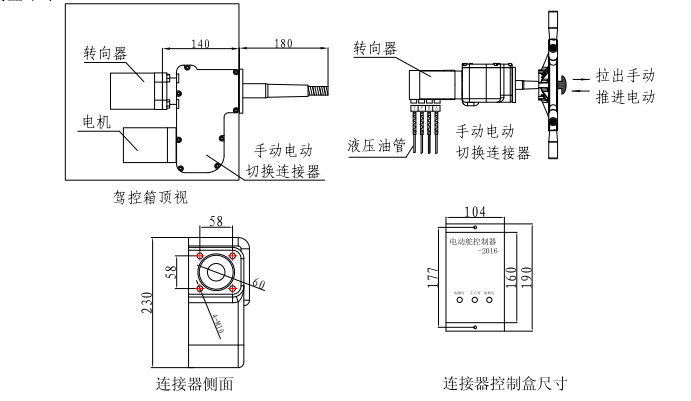
使用方法:将中心拉杆拉出,由方向盘来操舵,中间手柄推进,方向盘分离由电机操舵,电机上碳刷每半年检查一次,如发现碳刷磨损严重应及时更换。
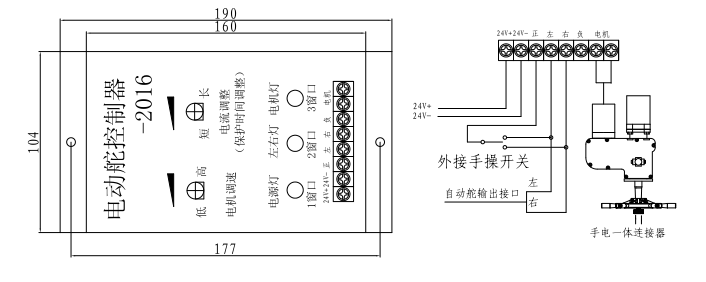
2.手电一体控制器
将控制盒安装在通风干燥处,按照控制盒上所印接线图接上各配件和电源线。
通上直流24V电源时,控制盒电源指示灯亮,将档位向前推使方向盘分离,此时转向器处于电动状态。按自动舵左右键或操舵开关拔向左右使电机向左或向右运行,并查看操舵方向是否正确,(按左:2和3窗口的左灯亮,按右:2和3窗口的右灯亮)如方向相反,则调换左右两条控制线。注:2窗口灯亮说明自动舵主机电磁阀输入电压信号正常;3窗口灯亮说明控制器电机输出端输出正常。
3.电磁阀控制板
注意:不要把电磁阀控制板安装在有剧烈振动或直接暴露在海水、海风或雨水中,否则将使该单元产生故障,导致操舵失灵。正1负1输入电源,左1右1输
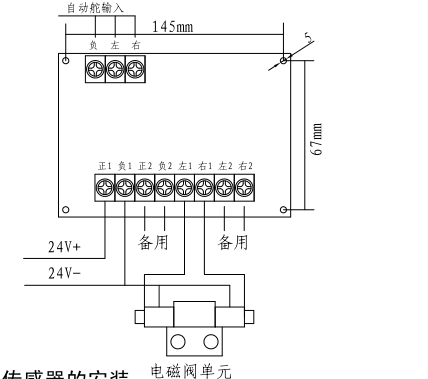 出(并且有指示灯指示),正2负2输入电源,左2右2输出(并且有指示灯指示)。
出(并且有指示灯指示),正2负2输入电源,左2右2输出(并且有指示灯指示)。
三.磁方位传感器的安装
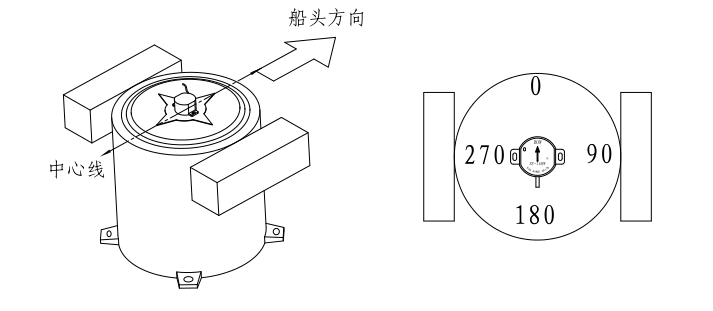
由于方位传感器或对磁场相当敏感,当安装位置周围的磁场发生变化时,它就会受到影响,在进行自动驾驶时,磁场的急剧变化将引起船向急转而发生危险,因此方位传感器与有磁场产生的装置(如电磁阀、电机等)至少保留50cm以上的间隙,并确认不会受到该磁场的影响,附近禁止放置带有磁性的工具或物体。
*将磁罗经安装在船的中心线或与中心线保持平行的位置处,并请罗经师将磁罗经校正,这样会提高自动驾驶时船方位的精度。
*将方位传感器上的尖头对准磁罗经的中心线,把方位传感器底部的粘胶纸撕下,并且固定在磁罗经正面的中心位置下,再将方位传感器的电缆进行适当的固定
>时,控制盒电源指示灯亮,将档位向前推使方向盘分离,此时转向器处于电动状态。按自动舵左右键或操舵开关拔向左右使电机向左或向右运行,并查看操舵方向是否正确,(按左:2和3窗口的左灯亮,按右:2和3窗口的右灯亮)如方向相反,则调换左右两条控制线。注:2窗口灯亮说明自动舵主机电磁阀输入电压信号正常;3窗口灯亮说明控制器电机输出端输出正常。
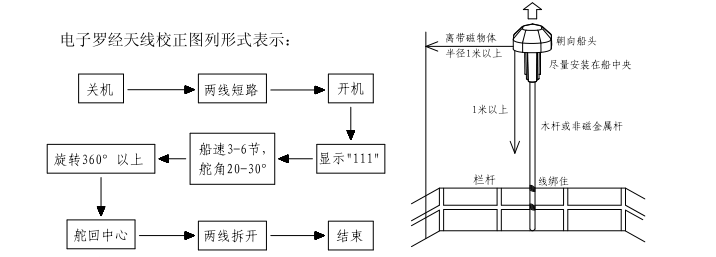
四.电子罗经的安装、调试与校正
因罗经在铁船上需罗经师调整校正比较麻烦,而多数不校正引起罗经不稳定,使自动舵不好用,现由本公司生产的三维电子罗经代替。
将电子罗经天线箭头朝船头方向,用胶布固定在一米五至两米以上的毛竹、木杆或不锈钢等没有磁性的棒子上,并安装在驾驶室顶栏杆上,一定要绑牢固,不能摇晃或松动,尽量中心位置与船同一平行线上,上下左右前后一米以内不能有铁或磁性的物件。
注意:不能装在铁杆上,不能装在船边上。船老大必须正确安装及安步骤来校正。
SY-288彩屏自动舵说明书-详细内容请点下载
自动舵,全称"自动操舵装置控制系统",又称"自动操舵装置"。是指能自动及时纠正船舶的偏航,使船较长时间和较准确地保持在指定航向的一种操舵装置。其工作原理为:当船首受到风浪、流等外力作用而偏离原航向一定角度(偏航角)时,该装置立即动作,使舵叶偏转一定角度(偏舵角),船首在舵力作用下逐渐返回原航向;为防止船首回转惯性过大,船首在未到达和接近原航向时,该装置使舵正舵或产生一个反舵角,从而使船首回到原航向。为了适应船舶的不同受载状况和海况,一般自动舵还设置了一些调节旋钮。自动舵模拟并代替了,人工操舵方式,其保持航向的精度比人工操舵高,对地提高了航速。目前,海船上常用的自动舵有比例-微分舵、比例-微分-积分航、自适应舵和自动驾驶仪(航迹舵)等。
船舶操纵的自动舵是船舶系统中的一个不可缺少的重要设备,是用来控制船舶航向的设备,能使船舶在预定的航向上的运行,随着现代科学技术的不断进步,各种先进仪器的使用,使用船舶操纵开始向智能化方向发展,本文就船舶操纵自动舵的构成的工作原理方面进行了综述。
关键字:船舶,自动舵,现代船舶自动化
船舶操纵的自动舵是船舶系统中一个不可缺少的重要设备,是用来控制船舶航向的设备,能使船舶的预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备。它的性能直接关系到船舶的航行安全和经济效益。代替人力操舵的自动舵的发展在相当程度上减少了人力,节省了燃料,降低了机械磨损,直接影响到船舶航行的操纵性、经济性和安全性。
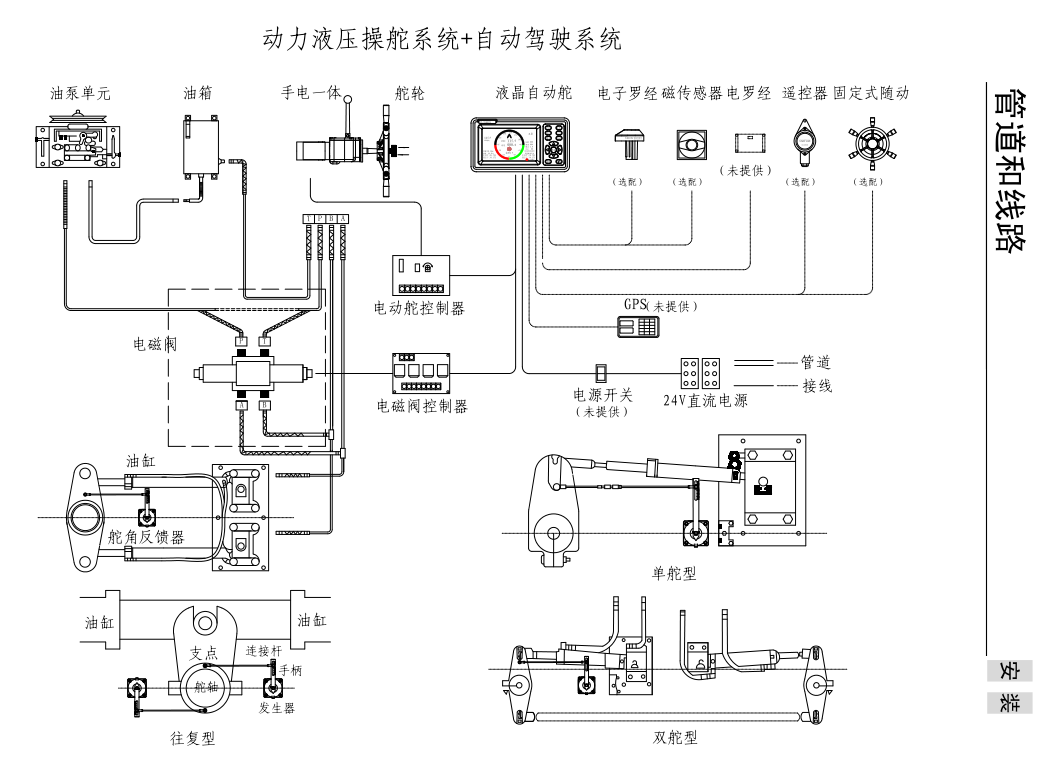
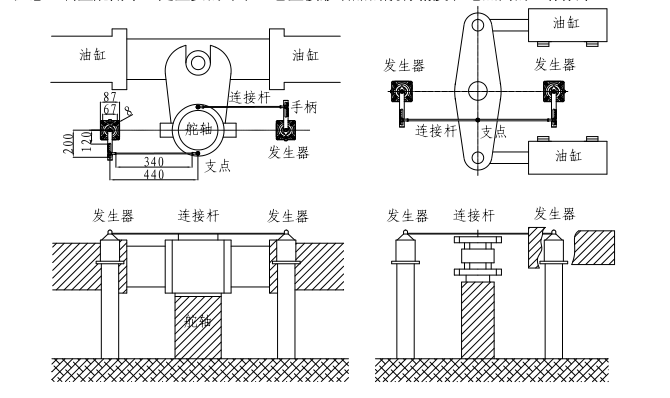
舵机装置由操舵装置、舵机、传动机构和舵叶四部分组成。
(1)操舵装置:操舵装置的指令系统,由驾驶室的发送装置和舵机房的接受装置组成。
(2)舵机:转舵的动力。
(3)传动机构:能将多机产生的转舵力矩传递给舵杆。
(4)舵叶:环绕舵柱偏转,承受水流的作用力,以产生转舵力矩。
在自动操舵仪中,按控制系统分类可分为三种操舵方式:
(1)直接控制系统或称单舵系统、应急操舵。
(2)随动控制系统。
(3)自动操舵控制系统,又称自动航向稳定系统。
自动操舵适用于船舶在海面上长时间航行,随动操舵供船舶经常改变航向时使用,如在内河、狭航道区和进出港口。当自动航向/航迹、随动操纵出现故障时,可用应急的简单操舵,直接由人工控制电磁换向阀,使舵正、反或停转。
原理:利用电罗经检测船舶实际航向α,然后与给定航向Κº进行比较,其差值作为操舵装置的输入信号,使操舵装置动作,改变偏舵角β。在舵角的作用下,船舶逐渐回到正航向上。船舶回到正航向后,舵叶不再偏转。
自动舵的控制原理:
(1)比例舵(Ρ舵)
比例舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例关系,即:
β=-K1φ(2-1)
β:偏舵角,K1:比例系数,φ:偏航角,-:偏舵角方向是消除偏航。
K1是可调的比例系数,一般根据船型、吃水、装载量来确定。但船舶载荷增加(惯量J加大)而且航速变慢,使周期T变长。为了缩短周期使船舶偏航迅速消除,就可加大K1。随船型而不同,对万吨船来说,一般为2~3,即偏航1º时,偏航角为2~3º。比例系数过大,将使船舶偏航振幅加大。因此比例操舵虽然简单、可靠,但航向稳定精度较差。当受一舷持续偏航力矩作用时,不能保证船舶的定向航行。
性能:可消除偏航。
特点:机构简单,航行保持精度较差,船舶营运经济性较差(会出现S型航迹)。
比例舵的不足:偏航初期偏舵角较小,不能很快阻止船舶继续偏航;回航过程中船舶有惯性,偏舵角不能及时减小,容易反向偏航。
(2)比例—微分舵(PD舵)
比例-微分舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例-微分关系,即:β=-(K1φ+K2dφ/dt)(2-2)
(表示偏舵角与偏航角和偏航角速度成比例)
如果传播航速度大,产生的-K2dφ/dt也大,则舵角β就增加,船回航时dφ/dt变号,使回舵角增加。
微分部分作用是保证偏舵速度和偏舵角,从而能教好地克服船舶惯性,提高航向的精度,减少船舶的S航迹,使船舶较性的稳定在正航向上。
原理:船舶回到正航向前,已受到微分部分的反向舵作用,从而能有效地阻止因惯性而向反方向的偏航。微分舵又叫纠偏舵、稳舵角或反舵角。偏航初期,偏舵角变化率大,比例-微分舵能及时给出大偏舵,有效地阻止船舶反向偏航(最大偏航角较小);回航时,偏航角变化率变为负值,能适时给出反舵角,阻止船舶反向偏航,即能有效阻止反向偏航。
主要特点:具有“超前校正”的控制作用,减小船舶航向的振荡,减轻航机负担,增加航速,提高系统灵敏度和船舶的营运效益。
(3)比例—微分—积分舵(PID舵)
组成:是在比例-微分舵基础上增加积分环节。
β=-(K1φ+K2dφ/dt+K3òφdt)(2-3)
积分环节作用是—克服不对称偏航。K3是积分系数。
积分环节工作原理:积分环节可以偏航持续时间进行累积,当某舷(侧)偏航持续的时间比另一舷(侧)持续时间长时,通过环节输出的信号(偏舵角)将继续保持,这个信号将通过执行机构使舵叶维持在一定的偏转角度上,从而使船舶具有克服单向偏航的能力。
由于卫星、计算机、雷达技术在船舶上的应用,现代船舶自动化程度相当高,自动操舵仪开始向智能舵发展。但是不管怎样发展,虽然它们的控制规律各不相同,但控制的目的是一致的,即能按照偏航角的大小转动相应舵角,并使船舶尽快地到达规定的航向。
公司的主要产品有:稳压电源、逆变器、稳压箱、集成传话器、GPS方位传感器、磁罗经方位传感器、雷达壳、自动舵、值班报警器、电动油门控制器、话筒等各种船用配件,深受广大客户的好评。
")
船用自动操舵仪
SY-288彩屏自动舵 详细说明书 请扫二维码
一、控制单元安装
1、控制单元
由于控制单元使用了许多精密的电子/电气元件,安装地点应满足如下要求:
1)应安装在湿度底的地方4)不直接暴露在海水或海风的地方
2)容易操作的地方5)不直接暴露在日晒的地方
3)容易安装和维修的地方6)不受振动的地方
注意:不要把该单元安装在有剧烈振动或直接暴露在海水、海风或雨水中,否则将使该单元产生故障,导致操舵失灵。
二.手电一体连接器安装
1.手电一体安装用法
在安装有转向器的船上,将手电一体连接器安装在转向器上,并固定在箱体上,再装上方向盘即可。
使用方法:将中心拉杆拉出,由方向盘来操舵,中间手柄推进,方向盘分离由电机操舵,电机上碳刷每半年检查一次,如发现碳刷磨损严重应及时更换。
2.手电一体控制器
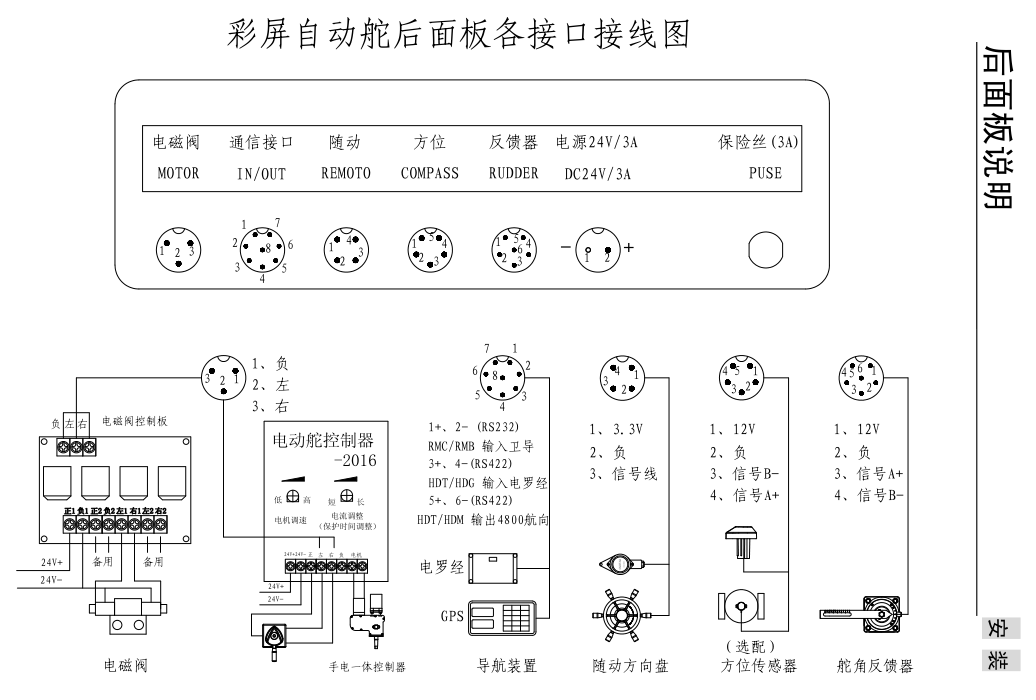
将控制盒安装在通风干燥处,按照控制盒上所印接线图接上各配件和电源线。
通上直流24V电源时,控制盒电源指示灯亮,将档位向前推使方向盘分离,此时转向器处于电动状态。按自动舵左右键或操舵开关拔向左右使电机向左或向右运行,并查看操舵方向是否正确,(按左:2和3窗口的左灯亮,按右:2和3窗口的右灯亮)如方向相反,则调换左右两条控制线。注:2窗口灯亮说明自动舵主机电磁阀输入电压信号正常;3窗口灯亮说明控制器电机输出端输出正常。
3.电磁阀控制板
注意:不要把电磁阀控制板安装在有剧烈振动或直接暴露在海水、海风或雨水中,否则将使该单元产生故障,导致操舵失灵。正1负1输入电源,左1右1输
出(并且有指示灯指示),正2负2输入电源,左2右2输出(并且有指示灯指示)。
三.磁方位传感器的安装
由于方位传感器或对磁场相当敏感,当安装位置周围的磁场发生变化时,它就会受到影响,在进行自动驾驶时,磁场的急剧变化将引起船向急转而发生危险,因此方位传感器与有磁场产生的装置(如电磁阀、电机等)至少保留50cm以上的间隙,并确认不会受到该磁场的影响,附近禁止放置带有磁性的工具或物体。
*将磁罗经安装在船的中心线或与中心线保持平行的位置处,并请罗经师将磁罗经校正,这样会提高自动驾驶时船方位的精度。
*将方位传感器上的尖头对准磁罗经的中心线,把方位传感器底部的粘胶纸撕下,并且固定在磁罗经正面的中心位置下,再将方位传感器的电缆进行适当的固定
>时,控制盒电源指示灯亮,将档位向前推使方向盘分离,此时转向器处于电动状态。按自动舵左右键或操舵开关拔向左右使电机向左或向右运行,并查看操舵方向是否正确,(按左:2和3窗口的左灯亮,按右:2和3窗口的右灯亮)如方向相反,则调换左右两条控制线。注:2窗口灯亮说明自动舵主机电磁阀输入电压信号正常;3窗口灯亮说明控制器电机输出端输出正常。
四.电子罗经的安装、调试与校正
因罗经在铁船上需罗经师调整校正比较麻烦,而多数不校正引起罗经不稳定,使自动舵不好用,现由本公司生产的三维电子罗经代替。
将电子罗经天线箭头朝船头方向,用胶布固定在一米五至两米以上的毛竹、木杆或不锈钢等没有磁性的棒子上,并安装在驾驶室顶栏杆上,一定要绑牢固,不能摇晃或松动,尽量中心位置与船同一平行线上,上下左右前后一米以内不能有铁或磁性的物件。
注意:不能装在铁杆上,不能装在船边上。船老大必须正确安装及安步骤来校正。
SY-288彩屏自动舵说明书-详细内容请点下载
自动舵,全称"自动操舵装置控制系统",又称"自动操舵装置"。是指能自动及时纠正船舶的偏航,使船较长时间和较准确地保持在指定航向的一种操舵装置。其工作原理为:当船首受到风浪、流等外力作用而偏离原航向一定角度(偏航角)时,该装置立即动作,使舵叶偏转一定角度(偏舵角),船首在舵力作用下逐渐返回原航向;为防止船首回转惯性过大,船首在未到达和接近原航向时,该装置使舵正舵或产生一个反舵角,从而使船首回到原航向。为了适应船舶的不同受载状况和海况,一般自动舵还设置了一些调节旋钮。自动舵模拟并代替了,人工操舵方式,其保持航向的精度比人工操舵高,对地提高了航速。目前,海船上常用的自动舵有比例-微分舵、比例-微分-积分航、自适应舵和自动驾驶仪(航迹舵)等。
船舶操纵的自动舵是船舶系统中的一个不可缺少的重要设备,是用来控制船舶航向的设备,能使船舶在预定的航向上的运行,随着现代科学技术的不断进步,各种先进仪器的使用,使用船舶操纵开始向智能化方向发展,本文就船舶操纵自动舵的构成的工作原理方面进行了综述。
关键字:船舶,自动舵,现代船舶自动化
船舶操纵的自动舵是船舶系统中一个不可缺少的重要设备,是用来控制船舶航向的设备,能使船舶的预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备。它的性能直接关系到船舶的航行安全和经济效益。代替人力操舵的自动舵的发展在相当程度上减少了人力,节省了燃料,降低了机械磨损,直接影响到船舶航行的操纵性、经济性和安全性。
舵机装置由操舵装置、舵机、传动机构和舵叶四部分组成。
(1)操舵装置:操舵装置的指令系统,由驾驶室的发送装置和舵机房的接受装置组成。
(2)舵机:转舵的动力。
(3)传动机构:能将多机产生的转舵力矩传递给舵杆。
(4)舵叶:环绕舵柱偏转,承受水流的作用力,以产生转舵力矩。
在自动操舵仪中,按控制系统分类可分为三种操舵方式:
(1)直接控制系统或称单舵系统、应急操舵。
(2)随动控制系统。
(3)自动操舵控制系统,又称自动航向稳定系统。
自动操舵适用于船舶在海面上长时间航行,随动操舵供船舶经常改变航向时使用,如在内河、狭航道区和进出港口。当自动航向/航迹、随动操纵出现故障时,可用应急的简单操舵,直接由人工控制电磁换向阀,使舵正、反或停转。
原理:利用电罗经检测船舶实际航向α,然后与给定航向Κº进行比较,其差值作为操舵装置的输入信号,使操舵装置动作,改变偏舵角β。在舵角的作用下,船舶逐渐回到正航向上。船舶回到正航向后,舵叶不再偏转。
自动舵的控制原理:
(1)比例舵(Ρ舵)
比例舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例关系,即:
β=-K1φ(2-1)
β:偏舵角,K1:比例系数,φ:偏航角,-:偏舵角方向是消除偏航。
K1是可调的比例系数,一般根据船型、吃水、装载量来确定。但船舶载荷增加(惯量J加大)而且航速变慢,使周期T变长。为了缩短周期使船舶偏航迅速消除,就可加大K1。随船型而不同,对万吨船来说,一般为2~3,即偏航1º时,偏航角为2~3º。比例系数过大,将使船舶偏航振幅加大。因此比例操舵虽然简单、可靠,但航向稳定精度较差。当受一舷持续偏航力矩作用时,不能保证船舶的定向航行。
性能:可消除偏航。
特点:机构简单,航行保持精度较差,船舶营运经济性较差(会出现S型航迹)。
比例舵的不足:偏航初期偏舵角较小,不能很快阻止船舶继续偏航;回航过程中船舶有惯性,偏舵角不能及时减小,容易反向偏航。
(2)比例—微分舵(PD舵)
比例-微分舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例-微分关系,即:β=-(K1φ+K2dφ/dt)(2-2)
(表示偏舵角与偏航角和偏航角速度成比例)
如果传播航速度大,产生的-K2dφ/dt也大,则舵角β就增加,船回航时dφ/dt变号,使回舵角增加。
微分部分作用是保证偏舵速度和偏舵角,从而能教好地克服船舶惯性,提高航向的精度,减少船舶的S航迹,使船舶较性的稳定在正航向上。
原理:船舶回到正航向前,已受到微分部分的反向舵作用,从而能有效地阻止因惯性而向反方向的偏航。微分舵又叫纠偏舵、稳舵角或反舵角。偏航初期,偏舵角变化率大,比例-微分舵能及时给出大偏舵,有效地阻止船舶反向偏航(最大偏航角较小);回航时,偏航角变化率变为负值,能适时给出反舵角,阻止船舶反向偏航,即能有效阻止反向偏航。
主要特点:具有“超前校正”的控制作用,减小船舶航向的振荡,减轻航机负担,增加航速,提高系统灵敏度和船舶的营运效益。
(3)比例—微分—积分舵(PID舵)
组成:是在比例-微分舵基础上增加积分环节。
β=-(K1φ+K2dφ/dt+K3òφdt)(2-3)
积分环节作用是—克服不对称偏航。K3是积分系数。
积分环节工作原理:积分环节可以偏航持续时间进行累积,当某舷(侧)偏航持续的时间比另一舷(侧)持续时间长时,通过环节输出的信号(偏舵角)将继续保持,这个信号将通过执行机构使舵叶维持在一定的偏转角度上,从而使船舶具有克服单向偏航的能力。
由于卫星、计算机、雷达技术在船舶上的应用,现代船舶自动化程度相当高,自动操舵仪开始向智能舵发展。但是不管怎样发展,虽然它们的控制规律各不相同,但控制的目的是一致的,即能按照偏航角的大小转动相应舵角,并使船舶尽快地到达规定的航向。
公司的主要产品有:稳压电源、逆变器、稳压箱、集成传话器、GPS方位传感器、磁罗经方位传感器、雷达壳、自动舵、值班报警器、电动油门控制器、话筒等各种船用配件,深受广大客户的好评。
在线留言
在社交媒体上关注我们
Copyright: ©温岭市三鸥电子有限公司 技术声明
浙ICP备16042848号-1 网站建设:中企动力台州