
Product series:
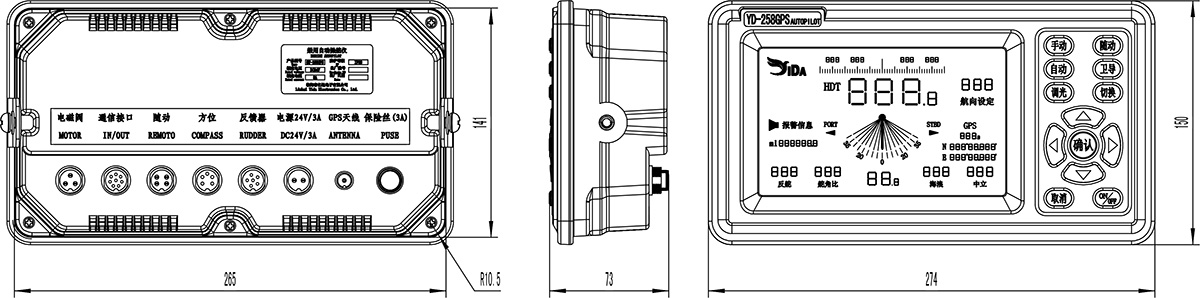
YD-258 Color-Screen Auxiliary Steering Gear
SanOu offer a full line of competitive products,that was regulator power supply,spacer,regulator box,intergration speaker,GPX fix sensor,magnetic fix sensor,dadar shell,automotic rudder,speaker etc.

Description
SanOu offer a full line of competitive products,that was regulator power supply,spacer,regulator box,intergration speaker,GPX fix sensor,magnetic fix sensor,dadar shell,automotic rudder,speaker etc. With the "Credit" as its business idea, SanOu will do the best to serve their customers for the good future.
Marine ancillary products refer to all marine equipment and devices except the hull, which is an important part of the shipbuilding industry. These products cover a wide range of equipment and systems required for navigation, operation, safety and daily operation of ships. Specifically, marine ancillary products mainly include the following categories: Power equipment: such as ship main engine, auxiliary engine, steam boiler, thruster, shafting, etc., which are the core equipment that provides ship power and power. The main engine of a merchant ship is usually the ship's diesel engine, while the auxiliary power unit is the ship's generator, which provides electrical energy for the ship in normal and emergency situations. Maneuvering equipment: including steering gear, steering gear, autopilot, remote control system, etc., which are used to control the course, speed and attitude of the ship. Loading and unloading equipment: such as cranes, cranes, conveyor belts, etc., used to realize the loading and unloading and transportation of goods.
Operating principle: An autopilot is a device that automatically controls the steering gear to keep the vessel sailing on a predetermined course. Based on the error signal—representing the difference between the vessel’s current heading and the set course (i.e., the yaw angle)—the autopilot adjusts the steering gear to generate an appropriate rudder angle, thereby ensuring that the ship stays on the designated course.
It consists of the host YD-258, the generator FB-45, the 2D azimuth sensor SY-11W, the 3D electronic compass DCM-1, the remote controller RSC-1, and standard accessories.
4 modes: 1. Manual mode 2. Follow-up mode 3. Automatic mode 4. GPS mode
Advantages: Easy ship maneuvering, saving human resources.
Size
An autopilot, formally known as the "Automatic Steering Control System," is also referred to as an "Automatic Steering Device." It is a steering system that can automatically and promptly correct a vessel's deviation from its intended course, enabling the ship to maintain its designated heading accurately and over extended periods. The operating principle of an autopilot is as follows: When the ship's bow is subjected to external forces such as wind, waves, or currents and deviates from its original course by a certain angle (the yaw angle), the autopilot immediately activates, causing the rudder blade to deflect by a specific angle (the rudder deflection angle). Under the influence of the rudder force, the ship's bow gradually returns to its original course. To prevent excessive inertial rotation of the ship's bow, just before the bow reaches or approaches its original heading, the autopilot either centers the rudder or generates a counter-rudder angle, thereby ensuring that the ship's bow smoothly returns to its original course. To accommodate various loading conditions and sea states, most autopilots are equipped with adjustable knobs and controls. The autopilot simulates and replaces manual steering methods; it offers higher accuracy in maintaining the ship's course than manual steering and can significantly improve the vessel's speed. Currently, commonly used autopilots on seagoing vessels include proportional-differential steering systems, proportional-differential-integral steering systems, adaptive steering systems, and automatic pilots (track-keeping steering systems).
The automatic steering gear is an indispensable and crucial component of a ship’s system. It is the device used to control the ship’s course, enabling it to maintain its intended heading. With the continuous advancement of modern science and technology and the increasing use of sophisticated instruments, ship steering systems are gradually shifting toward智能化 (intelligent) operation. This article provides a comprehensive overview of the composition and operating principles of automatic steering gears for ships.
Keywords: ship, autopilot, modern ship automation
The automatic steering system is an indispensable and vital component of a ship’s systems. It is the device used to control the ship’s course, enabling it to maintain its predetermined heading. By counteracting various disturbances that might cause the ship to deviate from its intended course, the automatic steering system ensures that the vessel remains automatically stabilized on its planned course. It is a key piece of equipment for ship maneuvering. The performance of this system is directly linked to the ship’s navigational safety and economic efficiency. The development of automatic steering systems, which replace manual steering, has significantly reduced the need for human labor, saved fuel, and minimized mechanical wear. As a result, it directly impacts the ship’s maneuverability, economy, and safety during navigation.
The steering gear assembly consists of four main components: the steering control mechanism, the steering gear, the transmission mechanism, and the rudder blade.
(1) Steering Gear: The steering gear’s command system consists of a transmitting device in the bridge and a receiving device in the steering gear room.
(2) Servo motor: The power source for steering.
(3) Transmission mechanism: It can transmit the rudder torque generated by multiple machines to the rudder stock.
(4) Rudder blade: It rotates around the rudder stock, bearing the force exerted by the water flow to generate a steering torque.
In autopilots, classified by control system, there are three types of steering modes:
(1) Direct control system, also known as a single-rudder system or emergency steering.
(2) Servo control system.
(3) Automatic steering control system, also known as the automatic course-keeping system.
Automatic steering is suitable for vessels sailing on the sea for extended periods, while follow-up steering is used when a vessel frequently changes course—for example, in inland waterways, narrow channels, and during port entry and exit. When automatic heading/track steering or follow-up steering fails, an emergency simple steering system can be activated, directly controlling the electromagnetic reversing valve manually to turn the rudder fully to the right, fully to the left, or stop it completely.
Principle: The gyrocompass is used to detect the vessel’s actual heading α, which is then compared with the desired heading κ°. The resulting difference serves as the input signal for the steering gear, causing it to actuate and adjust the rudder angle β. Under the influence of the rudder angle, the vessel gradually returns to its correct course. Once the vessel has returned to its proper heading, the rudder blade no longer deviates.
The control principle of autopilot:
(1) Proportional Rudder (Ρ Rudder)
The law governing rudder steering with proportional control is: the magnitude of the rudder angle β is proportional to the magnitude of the yaw angle φ, that is:
β = -K1φ(2-1)
β: Rudder deflection angle, K1: Proportional gain, φ: Yaw angle, -: The direction of rudder deflection is to counteract yaw.
K1 is an adjustable proportional coefficient, typically determined based on the ship’s hull form, draft, and load capacity. However, as the ship’s load increases (leading to a greater moment of inertia J) and its speed slows down, the period T becomes longer. To shorten the period and enable rapid correction of the ship’s yaw, K1 can be increased. The value of K1 varies depending on the ship’s hull form; for ships weighing tens of thousands of tons, it generally ranges from 2 to 3—meaning that when the ship yaws by 1°, the resulting yaw angle will be 2° to 3°. If the proportional coefficient is set too high, it will cause the ship’s yaw amplitude to increase. Therefore, although proportional steering is simple and reliable, it offers relatively poor heading stability accuracy. When subjected to a sustained yawing torque acting on one side, this method cannot guarantee the ship’s steady directional navigation.
Performance: Can eliminate yaw.
Features: The mechanism is simple, but navigation accuracy is relatively poor, and the vessel's operational economy is low (resulting in an S-shaped track).
Shortcomings of the proportional rudder: In the initial stage of yaw, the rudder angle is relatively small, making it unable to quickly halt the ship's continued yawing. During the return-to-course phase, due to the ship's inertia, the rudder angle cannot be reduced promptly, easily leading to reverse yawing.
(2) Proportional-Derivative (PD) Steering
The law governing proportional-differential rudder steering is that the magnitude of the rudder angle β is proportionally and differentially related to the magnitude of the yaw angle φ, i.e., β = -(K1φ + K2 dφ/dt) (2-2).
(Indicates that the rudder angle is proportional to the yaw angle and yaw rate.)
If the propagation speed of the ship is high, the resulting -K2dφ/dt will also be large; consequently, the rudder angle β will increase. As the ship turns back, dφ/dt changes sign, causing the return rudder angle to increase as well.
The differential component ensures the proper rate and angle of rudder deflection, thereby effectively overcoming the ship’s inertia, improving course-keeping accuracy, reducing the ship’s S-shaped track, and maintaining the ship’s stability on a straight course.
Principle: As the vessel returns to its intended course, it is subjected to a rudder action in the opposite direction provided by the differential component, thereby effectively counteracting any yawing tendency caused by inertia. The differential rudder is also referred to as the correcting rudder, stabilizing rudder angle, or counter-rudder angle. In the initial stage of yawing, when the rate of change of the rudder angle is high, the proportional-differential rudder promptly generates a large corrective rudder input, effectively preventing the vessel from yawing in the opposite direction (resulting in a smaller maximum yaw angle). During the return-to-course phase, as the rate of change of the yaw angle becomes negative, the differential rudder timely provides a counter-rudder angle, thus effectively preventing the vessel from yawing in the reverse direction and successfully counteracting any reverse yawing tendency.
Key features: It features “advanced compensation” control, which reduces oscillations in the ship’s course, alleviates the burden on the steering gear, increases cruising speed, enhances system responsiveness, and improves the operational efficiency of the vessel.
(3) Proportional-Integral-Derivative (PID) Steering
Composition: It adds an integral term on the basis of a proportional-derivative controller.
β = -(K1φ + K2 dφ/dt + K3 ∫φ dt) (2-3)
The purpose of the integral term is to overcome asymmetric yaw. K3 is the integral gain.
Working principle of the integration loop: The integration loop accumulates the duration of yaw. When the duration of yaw on one side exceeds that on the other side, the signal output by the loop (the rudder angle) will remain constant. This signal, transmitted through the actuator, keeps the rudder blade at a fixed deflection angle, enabling the vessel to counteract unidirectional yaw.
Thanks to the application of satellite, computer, and radar technologies on ships, modern vessels have reached a remarkably high degree of automation, and automatic steering systems are now evolving toward intelligent steering systems. However, regardless of how they evolve—though their control algorithms may differ—their ultimate control objective remains consistent: to turn the rudder by an appropriate angle in proportion to the magnitude of the yaw angle, thereby enabling the vessel to reach the designated course as quickly as possible.
The company’s main products include: voltage regulators, inverters, voltage stabilization boxes, integrated transceivers, GPS bearing sensors, magnetic compass bearing sensors, radar housings, autopilots, duty alarm systems, electric throttle controllers, microphones, and various other marine accessories—each of which has earned high praise from our customers.
Keyword:Shipping equipment,Boat Parts,Sanou
Satellite compass
Auto-pilot/Control Console
Electric throttle/hydraulic controller
Voltage regulator power supply/voltage regulator box
Steer the steering wheel
Rudder angle indicator/Revolution counter
Transmitter/Electric horn/Microphone
Monitor/Alarm/Signal Clock
Charger/Charging Station/Welding Machine
Marine antenna
Ship lighting lamps
Radar accessories
Signal distributor
Related Download
Recommended Products
